一、前言
随着虚拟制造技术的发展和应用的深入,仿真技术已广泛应用于制造业 的评估工艺计划和设备,以及新产品 设计。虚拟数控机床(Virtual Machine Tool,VMT)是虚拟制造的执行单元,是 虚拟制造的一个底层关键技术和前提条 件。它的最终目的是为虚拟制造建立一 个真实的加工环境,在计算机屏幕上实 现加工过程的仿真,以增强制造过程的各级决策与控制能力,优化制造过程。 通过虚拟机床不仅可以全面、逼真地反 映现实的加工环境和加工过程,还能 对加工中出现的碰撞、干涉提供报警信 息,对产品的可加工性、工艺规程的合 理性和加工精度进行评估、预测,达到节省资源、避免风险的目的。
如何结合高端软件建立虚拟机床, 并通过仿真加工过程检验数控加工程序 的正确性具有十分重要的作用。本文基 于N X软件构建了五轴联动数控铣床的虚 拟模型,实现了数控编程的虚拟制造。
二、NX4.0的功能
NX(以前称UG)是当前先进和精密集成的、面向制造业CAID/CAD/CAM/CAE的中高端软件。N X集成化加工切削 验证与机床运动仿真(IS&V)提供了 一套完全集成的刀具路径验证和仿真 解决方案,这套方案工作在相同的制 造环境中,共享相同的核心数据。允许用户在部件制造流程的早期验证刀具路径信息,以提高对最终生成NC程序的信心。
真正的仿真和干涉检查应当包含 机床、机床控制器、刀具以及加工工件 在内的大规模综合仿真和检验,N X系统 提供的机床构造器(MTB)功能恰恰符合了这样的要求。利用N X的集成化和功 能强大的建模、运动分析和加工功能,实现虚拟加工系统的运动仿真,并可动 态模拟毛坯金属材料的去除过程。
三、虚拟机床建模
建立虚拟机床要依据以下三个步骤:1)通过测量真实部件的尺寸来获得 它们相对应的尺寸;2)根据尺寸对数控 机床进行几何建模;3)根据所建立的几 何模型在系统中建立运动学模型。
1.建立机床部件3D模型
D M U 70V是德国德马吉(D M G)公 司生产的万能五轴镗铣加工中心,其 主要结构特点是回转/摆动工作台采用45°斜面实现工作台立卧转换,达到 五轴五面加工。因数控机床的系统十分 复杂,首先对数控机床进行适当简化, 在不损失仿真精度的前提下,建立数控 机床的抽象结构模型。在NX CAD环境下 将D M U 70V机床根据其结构、运动特点 将其模块化,分别建立机床底座、床 身、回转台、斜转台及各导轨等。将建 立好的机床模块根据机床运动的原理, 用N X的装配建模功能,在主模型下依据 机床处于非工作状态下的位置进行装配(见图1),即根据主模型的概念让各 个模块之间既有相关性又以参数化驱动,以便修改任意关键参数时可以保证全局的关系不变。
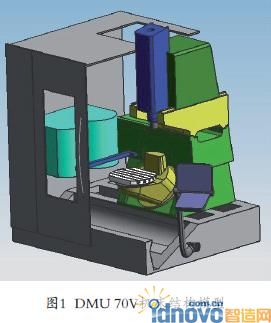
图1 DMU 70V机床结构模型
2.创建机床运动模型
进入机床构造器MTB(Machine Tool B u i l d e r)进行运动学模型的定义,并 在机床导航器中重新命名,新添机床 名“D M U_70_V”(双击“M T B”最上行“N O N A M E”命名)。运动模型是用来 描述机床运动的,定义了运动模型后机 床各组件的运动方式才能得以确定。
(1)定义机床基础部件
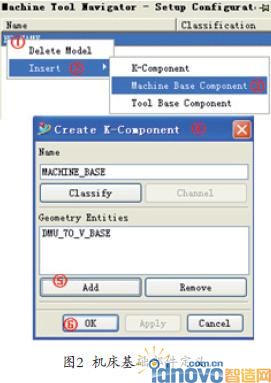
机床基础部件(机座组件)是创建机床运动关系的基础,是机床导航器中机床关系树的根,一般先定义机床床身。创建步骤如图2所示,顺序为:
“M T B”→“D M U_70_V”→“M B3”
(右键)→“I n s e r t”→“M a c h i n eBase Component”,在弹出的“CreateK-Component”对话框中选取“Add”→ 选取机床床身部件→“OK”。
(2)定义机床运动组件并分类
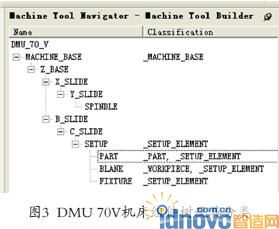
其他部件创建运动组件的方法也同图2步骤,根据机床运动和装配关系在上级部件下插入所要添加的“k-组 件”定义,“k-组件”的父、子关系 决定了它们的依存关系。当定义PART、BLANK和FIXTURE等设备组件时只需先定义名称并分类,不必指定几何对象。
分类的目的是为了在进行碰撞干涉检查时,可以按照类进行检查。通常需对毛坯、工件、夹具进行分类。如对加工件进行分类时,只要在弹出 如图2所示的运动组件定义对话框中点击“C l a s s i f y”选择匹配类型(P A R T/ SETUP_ELEMENT)即可。定义完所有运动组件并进行分类后就创建了如图3所示的组建树。
(3)创建连接坐标系并分类
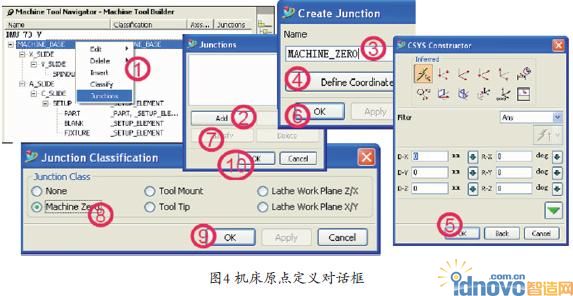
为便于描述机床各运动副之间的 相对运动关系,分别在机床原点、工件 和刀具上建立同向平行的坐标体系,且 使机床处于初始状态时,工件坐标系、刀具坐标系的坐标轴方向均与机床坐标系一致。 首先必须在机床基础件上定义机床坐标系及机床原点,用于指定机床各组 件的运动方向,因此机床坐标系轴方向 的确定很重要,但原点的位置可以定义 在机床任意点。创建一个名为“MACHINE_ ZERO”、分类为“Machine Zero”的连接 坐标系。操作步骤如图4所示。
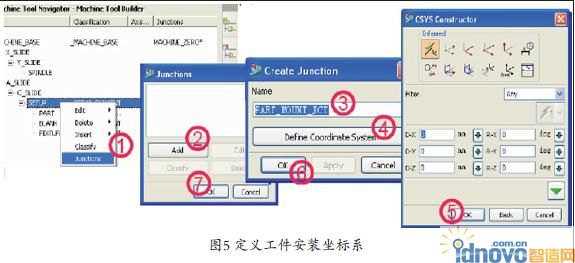
在机床工作台上按照如图5所示的 顺序创建一个名为“PART_MOUNT_JCT” 的连接,用于在模拟仿真时,安装加工 工件,将零件安装坐标系定位在当前工作坐标系位置(工作台中心)。P A R T_ M O U N T_J C T实际上是定义工件在机床上 安放时的参考点,即装卡原点。装卡原 点常见于带回转(或摆动)工作台的数控机床或加工中心,一般是机床工作台 上的一个固定点,比如回转工作台回转 中心,在零位时其与机床原点的偏移量 为定值,供CNC系统原点偏移计算用。
同样的方式在刀具主轴端面创建 一名为“T O O L_M O U N T_J C T”的连接, 用于模拟仿真时的安装刀具。应注意坐 标系方向,X 轴为刀具安装轴。
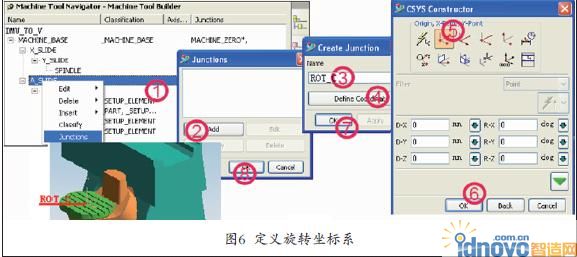
按照如图6所示的顺序,同上方法创建工作台相对于机床床身围绕Z轴旋转的 连接坐标系“ROT_C”,和围绕45°斜面 法线旋转的坐标系“ROT_B”。
(4)创建机床运动轴
该功能的作用是定义机床组 件的运动形式,定义 X 、 Y 、 Z 、 B 和C轴的行程范围及连接关系, 如 定 义 X 轴 , 在 X 轴 上 点 击 “ 左 键”→“MB3”→“Edit”→“Axis”→ 选择如图7所示的参数。
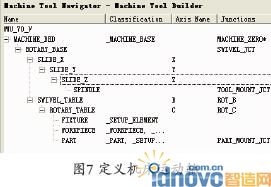
图7 定义机床运动轴
3.机床入库
建立好运动模型后,M T B导航器 窗口结构如图8所示,用机床模型文件 路径将设置好的机床加入到机床库以 便被调,通常按以下:MACH esourcelibrarymachinegraphicsDMU_70_V。
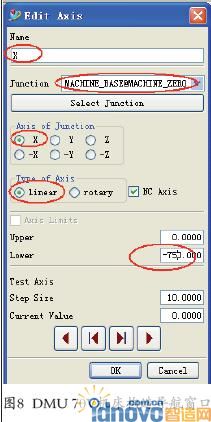
图8 DMU 70V机床构造导航窗口
4.修改机床库文件
在 MAC H res ou rc e l i b rar y machineasciimachine_database.dat下 添加新机床入口“D A T A|d m u_70_v|1|5_ Ax Mill(MM)|None|Ex:|${NXII_CAM_POST_DIR}dmu_70_v.dat|1.000000”,使机床库文件指向d m u_70_v.d a t文件,以便 在该“.dat”文件中,定义即将用的机 床后处理器。执行完以上操作步骤将 生成一个完整的虚拟机床,当需要时 就可以从机床库里调出并实现该机床 仿真运动和生成加工NC程序。
四、虚拟机床仿真加工与 验证
将建立好的虚拟机床添加到虚拟仿真机床库之后,就可以通过后置处理 实现加工过程仿真以验证。
1)首先在加工环境下打开要验证 的已生成刀具路径的加工件,使导航器 切换到刀具导航器,然后通过以下步骤载入建立好的虚拟机床运动模型: 双击“Generic_machine”→“Replace m a c h i n e”→“M i l l”→“d m u_70_v ” → “ C r e a t e P a r t M o u n t J u n c t i o n”→“U s e P a r t M o u n t Junction”→“OK”。
2)定义加工件及夹具,打开机床 构造导航器,与前面的添加组建同样 方式在载入的虚拟机床上定义机床加工 件、毛坯及夹具等。
3)定义加工刀具,在M T B环境中对 加工所需的刀具装配模型(刀具和刀柄 等)进行运动模型定义,方法与机床运动模型的定义类似。如果不提供刀具运 动模型,系统可以根据加工模型中的刀 具参数自动创建一个加工刀具,因此这 一步不是必须要有的。
4)定义机床驱动器(The Machine Tool Drive),为了模拟真实的机床NC 控制器行为,需要定义虚拟N C控制器控 制虚拟机床,在Post Builder中为机床 创建POST处理器时,可以自动生成机床 驱动文件。
5)进行I S V仿真(载入刀具运动模 型与I S V的设置和实现)。最后只要在 刀具导航器或几何体导航器选择具体 操作点右键激活仿真(simulate),即 可实现对应程序的仿真加工。
NX的用户还可以在仿真运行的同时 以图形化方式操纵显示屏,从而使得用户能从他们所希望的不同视角可视化地验证制造信息。所有机械加工操作的真 实再现,包括实时显示每项操作的除料 过程。图9和图10为在虚拟机床DMU 70V 上实现加工验证实例图。

五、结论
本文利用计算机仿真技术,建立提高数控机床运动精度的优化仿真模 型,同时利用现代测量技术,通过实验手段掌握数控机床在加工状态下的 动态性能和运行规律,验证数控机床 仿真模型的正确性,从而为数控机床 虚拟建模提供技术支持,使数控系统 网络化以及实现数控设备远程监控成 为可能。通过构建的DMU 70V五轴联动 数控铣床虚拟模型,实现了数控编程 的虚拟制造,比一些C A D/C A M单纯的刀 位文件仿真更真实、直观、更接近实 际加工情况,仿真后的N C程序不用试 切,可直接输入机床进行加工,极大 地提高数控编程的效率和质量。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF