本文探讨研究了在SolidWorks下的弧焊机器人虚拟示教系统相关内容。
1机器人示教编程方法的发展
机器人示教编程方式有两种:在线示教、离线示教。在线示教即手把手示教,简单方便,适用于大批量生产,所完成的任务简单单一,但是随着机器人适用任务的扩展和所完成任务的复杂程度的提高,在中小批量的生产中,用在线示教编程很难实现}z7。离线示教即脱离实际作业环境生成示教数据,间接地对机器人进行示教,对操作人员要求较高,使用也不太方便,尤其是在对机器人作业任务的描述上不能简单直接。虚拟示教编程充分利用上述两种示教方法的优点,借助于虚拟现实系统中的人机交互装置操作计算机屏幕上的虚拟机器人动作,经仿真通过后,记录示教点位姿、动作指令,将生成作业文件下载到机器人控制器,完成机器人的示教。
2弧焊机器人虚拟示教系统设计
该弧焊机器人示教系统主要分为四大部分,即实体建模、模型位姿调整、控制参数输人输出焊接机器人仿真示教等。
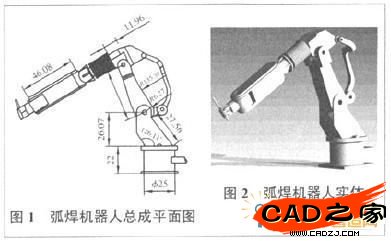
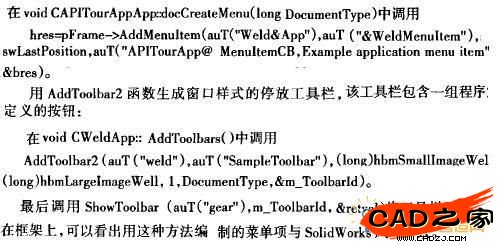
2.1弧焊机器人实体建模
首先根据实际几何参数,利用SolidWorks的实体造型功能构建出弧焊机器人各零件、待焊工件和工作空间的三维模型,如图1、图2所示。
2.2控制部分程序设计
2.2.1 Weld控制界面DLL程序设计
本文应用Visual C++开发虚拟示教系统,使用Visual C++编译出来的DLL (Dynamic Link Library)作为SolidWorks的插件将程序集成到SolidWorks中。Visual C++的工程向导Swizard.swx给出了Solid Works的基本开发模板,使用前须先将Swizard.swx复制Visual C++安装目录CommonlMSDev98Template文件夹下。
用向导创建一个名称为"Weld"的新DLL,插人对话框资源文件,使用编辑工具条在对话框上添加文本框、编辑框等控件,在对话框上点击右键选择类向导,为对话框创建一个新的类,然后为对话框的各个控件添加成员变量和成员函数并进行编辑,Weld控制界面如图3所示(程序代码从略)。

2.2.2对话框与SolidWorks的链接
用AddMenultem函数为当前下拉菜单添加菜单项或分割条
2.3逮拟环境下弧焊机器人的运动学规划
2.3.1弧焊机器人路径规划
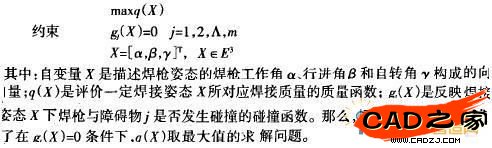
焊接机器人路径规划即对于某一指定焊缝规划出无碰撞的焊接机器人焊枪运动路径,对于弧焊机器人而言,即无碰路径规划。主要包括焊枪位置和焊枪姿态两个方面。在弧焊过程中,焊缝是焊枪位置的约束条件,避免碰撞是焊枪姿态最优化的约束条件,由此可以得出焊枪姿态最优化问题的数学模型:
2.3.2弧焊机器人轨迹规划
焊接机器人轨迹规划即焊接路径转换成焊接机器人各个关节的空间坐标,形成运动轨迹。其主要目标是使机器人避开关节极限和机器人退化区等运动限制,并保持机器人的灵活性与平稳性。本文中焊接机器人与变位机配合使用,将焊接机器人与变位机作为一个整体,认为是一个冗余度机器人系统,将轨迹规划问题表示为多性能指标融合控制问题,包括焊枪姿态函数、避免奇异空间函数、焊枪运动平稳函数和避免关节超限函数。其多性能指标融合轨迹规划的数学模型:

焊接机器人路径规划根据焊接参数提出的工艺要求.规划出无碰的焊枪位置和姿态。焊接机器人的轨迹规划针对具体的机器人运动限制.实现路径规划提出的焊枪位姿要求。
2.4弧焊机器人仿真示教
SolidWorks的Animator插件可以设定运动机构零部件的关键点。所谓"关键点"( Key Frame ),就是零部件的某个特定状态;当零部件的空间位置随时间发生变化时,"关键点"就是零部件运动前后的两个状态。
仿真示教时,首先粗定弧焊机器人的关键点,在Animator下设定的起始位置和终止位置后。如图4(a),(b),拖动时间滑杆设置运动时间,各零部件的运动类型(驱动和从动)由系统根据几何约束自动设定;然后在Weld控制界面下,根据实际情况,对弧焊机器人的位姿参数进行调节,如图4(c),使满足工艺条件;再进行模拟仿真,调整参数,排除运动过程中的奇异点和碰撞干涉点,如图4(d)。整个过程是仿真示教、参数调节一再示教得到最优结果。

在SolidWorks环境下,可以将焊接机器人各个构件的运动参数曲线输出,以旋转台为例,图5(a),(b)为旋转台在示教过程中的角度与速度变化曲线。

3结论
初步建立了弧焊机器人虚拟示教系统的SolidWorks三维实体建模、模型位姿调正、控制参数输人输出、焊接机器人仿真示教等四个模块。给用户提供具有良好临场感的三维虚拟环境和友好的人机交互界面.有助于提高弧焊机器人的工作效率和自动化程度。