副标题#e# 无论是传统的手工绘图设计,还是二维CAD计算机辅助设计,对于运动机构的设计都没有办法处理。简单的机构运动还可以模拟,但稍微复杂一点的运动机构就束手无策了,随着计算机辅助设计CAD的飞速发展,应用设计的功能日益增强,CAD已不仅仅限于二维图纸设计,而且只有建立三维立体模型,生成数控代码,将多个三维立体模型装配为构件并进行动态仿真的功能,通过在计算机上建立虚拟的装配模型,并对模型进行各种动态性能的分析,如装配过程中零件与零件干涉情况分析,从而可实现利用数字化形式模拟代替传统的实物试验,可大大简化产品的设计开发过程,优化构件的装配方案,如钢结构工程中可优化钢结构施工安装方案,大幅度缩短产品的开发周期,减少产品开发费用和成本,提高了系统性能,获得最优化和创新的设计产品。
目前,基于Solidworks, Pro/E, UG等CAD软件的立体零件建模,三维零件模拟装配等功能已经成熟,在计算机屏幕上便可实现以零件模型代替实物,进行方案选择及修改、运动分析及校核,为产品的设计开发带来很大的方便,以下结合Solidworks2006软件的特点,介绍其在对小高层钢结构住宅工程中钢结构安装的三维动态仿真的应用。
1 SolidWorks 2006的有关操作
1.1零件实体的建模
构件是由若干零件组成的,因此,在运动机构动态仿真前,要先做有关零件的实体建模。Solidworks2006用户界面非常人性化,便于操作。在Solidworks的标准菜单中,包含了各种用于创建零件特征和基准特征的命令。其中基础实体特征主要有拉伸凸台l基体、旋转凸台/基体等。在基础实体特征上可添加圆角、倒角、筋、抽壳、拔模及异型孔、线性阵列、圆周阵列、镜像等放置特征,这些特征的创建对于实体造型的完整性非常重要。在处理复杂的几何形状时还需要其它高级特征选项,包括扫描、放样凸台/基体及参考几何体中基准轴、基准面这些定位特征等。通过以上特征造型技术在Solidworks能设计出需要的实体特征。
1.2零件的装配
利用Solidworks的装配体模块,可将零件模型装配成机械系统。与传统的CAD创建三维装配体模型流程相比,在Solidworks装配体环境中可在位创建零件,也可以在装配体环境中修改零件而不需要单独打开该零件。当保存装配体时,零件文件也被保存到指定的目录。当在位创建零件,或在多个装配体中使用或重用零件时,可使用Solidworks创建的有自适应特征的零件,自适应零件能够根据其它零件自动调整到相应的大小和位置。这样可节约时间,提高精度,从而大大提高了设计的灵活性,减少了工作量。
1.3动态仿真可视化功能
当零件装配成一系统之后,常常需要对系统做运动分析。而分析结果最好的表达方式莫过于动画,因为动画是一种传递设计思想,记录仿真的良好载体,它的特点就在于形象和直观。Animator就是一个与Solidworks完全集成的动画制作软件插件,它能将Solidworks的三维模型实现动态的可视化,并且实时录制构件设计的模拟装配过程、模拟拆卸过程和构件的模拟运行过程,将设计者的意图更好地传递给客户。
在Solidworks2006中,Animator的功能得到了增强,它和Solidworks2006中另一插件PhotoWorks无缝结合,可充分利用Solidworks独有的实体模型和PhotoWorks的高品质的渲染功能。通过全相关来保证精度,包括保持配合约束关系和零件设计、装配设计和工程图之间的同步更新。通过增强的图形灯光控制来增强视觉效果。通过专业的灯光控制和为零件的特征增加材质,来产生高质量的动画效果。依靠庞大的材质、纹理和背景库,增强视觉冲击力。
2三维动态仿真实例
2.1仿真对象
本文以即墨德馨园小高层钢结构住宅A8楼为研究对象,动态仿真其第1节钢柱及钢梁的安装,详细地说明了钢结构安装仿真的操作步骤和方法。
2.2零件的三维建模
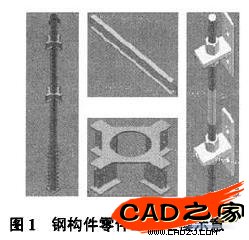
在本例主要需要4种零件,包括钢管柱、热扎H型钢梁、牛腿环板、钢柱对接连接器,其次是一些附件包括垫铁组、连接用的螺栓、螺母及栓钉等。如图1所示。
2.3钢构件的装配
以上零件完成建模后,就可以对其装配(钢结构构件安装)。先新建一个装配体然后在插人零部件对话框中点击浏览依次选择要插入的零部件即可。其中第1个加人的零件十分重要,它是整个装配体的装配基础,Solidworks已默认第1个零件为非运动体,其他所有的装配体零件都是以此为基础,本工程选择地基为装配参照体。调人零件后,要使零件之间达到准确的装配,必须建立准确的装配约束,两个零件之间的配合关系一般用6个自由度来描述:3个坐标方向的位移以及绕这3个坐标方向的转动,围绕这6个自由度,系统在配合菜单下提供了包括角度、重合、同心、距离、平行、垂直、相切的7种标准配合和包括凸轮推杆配合、齿轮配合、限制配合、对称配合、及宽度配合的4种高级配合,可以使用这些配合精确地放置实体。装配好的效果如图2所示。
目前,基于Solidworks, Pro/E, UG等CAD软件的立体零件建模,三维零件模拟装配等功能已经成熟,在计算机屏幕上便可实现以零件模型代替实物,进行方案选择及修改、运动分析及校核,为产品的设计开发带来很大的方便,以下结合Solidworks2006软件的特点,介绍其在对小高层钢结构住宅工程中钢结构安装的三维动态仿真的应用。
1 SolidWorks 2006的有关操作
1.1零件实体的建模
构件是由若干零件组成的,因此,在运动机构动态仿真前,要先做有关零件的实体建模。Solidworks2006用户界面非常人性化,便于操作。在Solidworks的标准菜单中,包含了各种用于创建零件特征和基准特征的命令。其中基础实体特征主要有拉伸凸台l基体、旋转凸台/基体等。在基础实体特征上可添加圆角、倒角、筋、抽壳、拔模及异型孔、线性阵列、圆周阵列、镜像等放置特征,这些特征的创建对于实体造型的完整性非常重要。在处理复杂的几何形状时还需要其它高级特征选项,包括扫描、放样凸台/基体及参考几何体中基准轴、基准面这些定位特征等。通过以上特征造型技术在Solidworks能设计出需要的实体特征。
1.2零件的装配
利用Solidworks的装配体模块,可将零件模型装配成机械系统。与传统的CAD创建三维装配体模型流程相比,在Solidworks装配体环境中可在位创建零件,也可以在装配体环境中修改零件而不需要单独打开该零件。当保存装配体时,零件文件也被保存到指定的目录。当在位创建零件,或在多个装配体中使用或重用零件时,可使用Solidworks创建的有自适应特征的零件,自适应零件能够根据其它零件自动调整到相应的大小和位置。这样可节约时间,提高精度,从而大大提高了设计的灵活性,减少了工作量。
1.3动态仿真可视化功能
当零件装配成一系统之后,常常需要对系统做运动分析。而分析结果最好的表达方式莫过于动画,因为动画是一种传递设计思想,记录仿真的良好载体,它的特点就在于形象和直观。Animator就是一个与Solidworks完全集成的动画制作软件插件,它能将Solidworks的三维模型实现动态的可视化,并且实时录制构件设计的模拟装配过程、模拟拆卸过程和构件的模拟运行过程,将设计者的意图更好地传递给客户。
在Solidworks2006中,Animator的功能得到了增强,它和Solidworks2006中另一插件PhotoWorks无缝结合,可充分利用Solidworks独有的实体模型和PhotoWorks的高品质的渲染功能。通过全相关来保证精度,包括保持配合约束关系和零件设计、装配设计和工程图之间的同步更新。通过增强的图形灯光控制来增强视觉效果。通过专业的灯光控制和为零件的特征增加材质,来产生高质量的动画效果。依靠庞大的材质、纹理和背景库,增强视觉冲击力。
2三维动态仿真实例
2.1仿真对象
本文以即墨德馨园小高层钢结构住宅A8楼为研究对象,动态仿真其第1节钢柱及钢梁的安装,详细地说明了钢结构安装仿真的操作步骤和方法。
2.2零件的三维建模
在本例主要需要4种零件,包括钢管柱、热扎H型钢梁、牛腿环板、钢柱对接连接器,其次是一些附件包括垫铁组、连接用的螺栓、螺母及栓钉等。如图1所示。
2.3钢构件的装配
以上零件完成建模后,就可以对其装配(钢结构构件安装)。先新建一个装配体然后在插人零部件对话框中点击浏览依次选择要插入的零部件即可。其中第1个加人的零件十分重要,它是整个装配体的装配基础,Solidworks已默认第1个零件为非运动体,其他所有的装配体零件都是以此为基础,本工程选择地基为装配参照体。调人零件后,要使零件之间达到准确的装配,必须建立准确的装配约束,两个零件之间的配合关系一般用6个自由度来描述:3个坐标方向的位移以及绕这3个坐标方向的转动,围绕这6个自由度,系统在配合菜单下提供了包括角度、重合、同心、距离、平行、垂直、相切的7种标准配合和包括凸轮推杆配合、齿轮配合、限制配合、对称配合、及宽度配合的4种高级配合,可以使用这些配合精确地放置实体。装配好的效果如图2所示。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF