2.1.2滑块
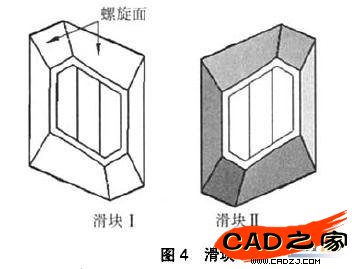
滑块为棱形,其两端分别加有与差速轮相对应的、左右交替的螺旋面。滑块有两种形式,为左右对称的实体,如图4所示,装配时,沿差速器壳内孔表面圆周方向相间地装入轴向槽内。滑块的主要作用是将差速器壳传递来的动力分配给左右两差速轮。
2.1.3差速器壳
差速器壳内孔表面加工有多个轴向梯形槽,在带动滑块转动的同时,差速时还允许滑块沿轴向槽移动。它直接与主减速器的从动齿轮相连,把主减速器传递来的动力通过滑块传递给左右两差速轮。

2.2工作原理
车辆直线行驶时,左右两轮受到地面的阻力矩相同,差速器分配给左右两差速轮的转矩也相同,左右两差速轮与滑块的转速达到一种平衡状态,三者转速相同,此时差速器不起差速作用。
车辆转弯时,由于外侧驱动轮存在滑移趋势,而内侧驱动轮存在滑转趋势,两驱动轮此时就会产生两个方向相反的附加力。根据"最小能耗原理",驱动轮在转弯时会自动趋向能耗最低状态,导致两侧车轮转速不同,并通过半轴反映到差速轮上,使得左右两差速轮转速也不相同,迫使滑块在转动的同时,克服碟形弹簧压力产生轴向滑移。由于弹簧的轴向压力作用,使滑块两端螺旋面始终与差速轮不同凸起的螺旋面相啮合,从而保证两侧车轮在不脱离传动的情况下实现差速。左右驱动轮之间的转速差是由于行驶阻力大小不同造成的,正是这一转速差迫使滑块产生轴向滑移。
由于差速器壳直接与主减速器的从动齿轮相连,即为主动件,因此设差速器壳的角速度(即滑块的角速度)为ωo,两差速轮为从动件,设其角速度分别为ω1和ω2。当车辆直线行驶时,差速器不起差速作用,滑块也不会产生轴向滑移,此时ω1=ω2=ω0;车辆转向时,ω1与ω2不相等,此时差速器起到差速作用,且应满足ω1+ω2=2ω。这里利用COSMOSMotion软件,通过运动仿真来验证轴向滑块凸轮式差速器是否能够满足差速器的设计要求。
3运动仿真
3.1仿真实体模型的建立
3.1.1零件实体模型的建立与装配
三维实体模型的建立是实现运动仿真的基础,正确与否直接影响着运动仿真的结果。因此,应按照二维图形尺寸,利用特征选项里的拉伸、旋转、放样、镜像及阵列等操作命令,分别对各零部件进行准确建模。
装配是进行运动仿真的基本保障。通过指定零件各面之间的配合关系,来确定零件的相对位置并完成装配,零件间的配合关系按其装配关系进行设置,配合关系的正确与否直接影响着运动仿真的结果。在零件装配过程中要按顺序进行,特别是滑块与差速轮之间,一定要进行碰撞检查,以保证二者之间螺旋面的完全贴合。装配时,只需按上述要求装人相邻的两个滑块即可,其余滑块可采用圆周阵列装人,简化了装配过程。由于仿真过程中采用的是虚拟弹簧,所以装配过程中勿须装人碟形弹簧。装配完毕后进行干涉检查,查看各零件之间是否存在下涉。装配完成后可生成爆炸图(如图2所示),直观地表达装配关系与装配意图。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF