副标题#e# 0前言
虚拟样机技术是建造物理样机前对设计对象在计算机上建立的虚拟模型机,利用其完成设计对象功能的可行性及其工作性能的分析,更好地理解系统的运动特性、动力特性,比较设计方案,优化设计,提高产品质量和机械设计效率等。仿真模型的建立和模拟现实条件是虚拟样机的重要基础。笔者设计的六自由度液压平台因其自由度较多,正过程的运动仿真比较困难,进行运动逆过程的仿真,即给定末部执行器的运动轨迹或运动参数,来研究各驱动液压缸的运动参数和特性,包括平台的建模、仿真运动过程、极限位置、最大运动量、干涉等。
1 液压平台的基本结构设计
液压六自由度运动平台本体结构包括上、下平台,变长杆系统,链接上、下平台和变长杆的铰接元件,力传感元件,位移传感元件等,如图1所示。
下平台为固定平台,上平台是可动平台,采用6根变长杆机构驱动。6根变长支杆采用铰接在上、下平台之间的液压缸进行运动驱动。从模仿人肌肉的角度出发,为体现机构、检测一体化的思想,将力传感器分别集成在液压平台的2个平台间的6个液压缸的缸杆上,用6个一维拉、压传感器检测1个六维力。
位移检测元件位移传感器选用FX.11型直流差动变压器式位移传感器。它把振荡器、相敏解调器与差动变压器封装在一起,只需提供稳定的直流电源,就能获得与位移量成线性关系的直流电压输出。铰接元件,采用万向节铰接设计。这样,在支路上,上、下万向节各有2个转动的自由度,液压缸伸缩有1个移动自由度,缺少的1个转动自由度由液压缸和液压活塞杆的相对转动实现。
按照上面的设计原则,采用的结构尺寸:上、下铰接元件的分布圆半径分别为上平台半径ra=300mm,下平台半径rb=600mm,液压缸行程为60mm,上、下平台的初始位置高度为h=1.5ra的负二次方,上、下铰接点之间的距离和上平台端铰接元件的分布圆之间的关系满足:l*l=4.5r*r另外,为了保证铰接元件运动副运动空间的充分利用,采用支座设计使铰接元件在液压缸的中间工作位置时处在原始状态(即铰接元件的轴线重合状态)。
2虚拟样机的建立与仿真
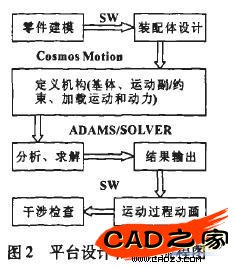
SW是美国SolidWorks公司生产的完全基于NT/Windows平台的集三维机械设计(CAD)、机构运动仿真分析和结构有限元分析(CAE)、计算机辅助制造(CAM)、大型企业管理(PDM)等各种功能为一体的软件。利用SW对六自由度液压平台进行建模和运动分析,必须以三维实体为基础,合理选择运动副和定义连杆的运动驱动,从而实现六自由度液压平台的正确运动仿真。同其它方法相比,该方法可以很容易解决看起来很复杂的机构系统仿真问题。依托SW强大的运动分析功能,能精确地对研究对象进行空间运动位置及运动参数的计算,并可以得出漂亮的虚拟现实的动画演示,能够很好地解决复杂机构的运动规律问题。通过建立虚拟仿真环境进行仿真试验研究,可以降低实验成本,提高实验效率。并且能够对运动状态进行仿真,检查机构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
2.1 零件建模
机构设计是和造型设计合为一体的,所以必须在零件模式下绘出零件的立体模型。SolidWorks是非常有效的三维设计软件,利用软件进行实体建模十分方便。根据部件的形状和尺寸,在SolidWorks软件的零件模块中利用拉伸、旋转、扫描等特征创建方式建立各个零件的模型。在建模过程中,一定要充分利用各零部件之间的位置关系和连接关系,选择合适的草绘平面、参照平面及特征的生成方式,即通过合理地设定各零件之间的父子关系,以尽量减少部件上的定位尺寸,提高设计效率。这里不做具体分析,主要零部件的建模结构如图3所示。
利用SW软件的零件建模模块(Parts)生成六自由度液压平台各零件的三维模型,其中平台的基座、上平台与液压缸联接用万向节的联接座,设计比较复杂和困难,因其接触配合面为一空间面,与坐标平面无任何位置关系,又要保证下动板处于中间位置时,液压缸和两侧的万向节的4个叉形接头轴线重合,并要保证与基座相接的万向节回转中心分布在直径600mm的圆上,与下动板相接的万向节回转中心分布在直径300mm的圆上,万向节两两成对,共3对,每对回转中间距80mm,圆周分布(参考图1和图6)。所以要经过精确空间位置计算,利用构建辅助线、辅助面、拉伸等方法完成建模。
虚拟样机技术是建造物理样机前对设计对象在计算机上建立的虚拟模型机,利用其完成设计对象功能的可行性及其工作性能的分析,更好地理解系统的运动特性、动力特性,比较设计方案,优化设计,提高产品质量和机械设计效率等。仿真模型的建立和模拟现实条件是虚拟样机的重要基础。笔者设计的六自由度液压平台因其自由度较多,正过程的运动仿真比较困难,进行运动逆过程的仿真,即给定末部执行器的运动轨迹或运动参数,来研究各驱动液压缸的运动参数和特性,包括平台的建模、仿真运动过程、极限位置、最大运动量、干涉等。

1 液压平台的基本结构设计
液压六自由度运动平台本体结构包括上、下平台,变长杆系统,链接上、下平台和变长杆的铰接元件,力传感元件,位移传感元件等,如图1所示。
下平台为固定平台,上平台是可动平台,采用6根变长杆机构驱动。6根变长支杆采用铰接在上、下平台之间的液压缸进行运动驱动。从模仿人肌肉的角度出发,为体现机构、检测一体化的思想,将力传感器分别集成在液压平台的2个平台间的6个液压缸的缸杆上,用6个一维拉、压传感器检测1个六维力。
位移检测元件位移传感器选用FX.11型直流差动变压器式位移传感器。它把振荡器、相敏解调器与差动变压器封装在一起,只需提供稳定的直流电源,就能获得与位移量成线性关系的直流电压输出。铰接元件,采用万向节铰接设计。这样,在支路上,上、下万向节各有2个转动的自由度,液压缸伸缩有1个移动自由度,缺少的1个转动自由度由液压缸和液压活塞杆的相对转动实现。
按照上面的设计原则,采用的结构尺寸:上、下铰接元件的分布圆半径分别为上平台半径ra=300mm,下平台半径rb=600mm,液压缸行程为60mm,上、下平台的初始位置高度为h=1.5ra的负二次方,上、下铰接点之间的距离和上平台端铰接元件的分布圆之间的关系满足:l*l=4.5r*r另外,为了保证铰接元件运动副运动空间的充分利用,采用支座设计使铰接元件在液压缸的中间工作位置时处在原始状态(即铰接元件的轴线重合状态)。
2虚拟样机的建立与仿真
SW是美国SolidWorks公司生产的完全基于NT/Windows平台的集三维机械设计(CAD)、机构运动仿真分析和结构有限元分析(CAE)、计算机辅助制造(CAM)、大型企业管理(PDM)等各种功能为一体的软件。利用SW对六自由度液压平台进行建模和运动分析,必须以三维实体为基础,合理选择运动副和定义连杆的运动驱动,从而实现六自由度液压平台的正确运动仿真。同其它方法相比,该方法可以很容易解决看起来很复杂的机构系统仿真问题。依托SW强大的运动分析功能,能精确地对研究对象进行空间运动位置及运动参数的计算,并可以得出漂亮的虚拟现实的动画演示,能够很好地解决复杂机构的运动规律问题。通过建立虚拟仿真环境进行仿真试验研究,可以降低实验成本,提高实验效率。并且能够对运动状态进行仿真,检查机构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
2.1 零件建模
机构设计是和造型设计合为一体的,所以必须在零件模式下绘出零件的立体模型。SolidWorks是非常有效的三维设计软件,利用软件进行实体建模十分方便。根据部件的形状和尺寸,在SolidWorks软件的零件模块中利用拉伸、旋转、扫描等特征创建方式建立各个零件的模型。在建模过程中,一定要充分利用各零部件之间的位置关系和连接关系,选择合适的草绘平面、参照平面及特征的生成方式,即通过合理地设定各零件之间的父子关系,以尽量减少部件上的定位尺寸,提高设计效率。这里不做具体分析,主要零部件的建模结构如图3所示。

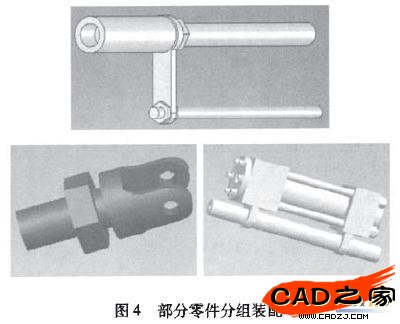
利用SW软件的零件建模模块(Parts)生成六自由度液压平台各零件的三维模型,其中平台的基座、上平台与液压缸联接用万向节的联接座,设计比较复杂和困难,因其接触配合面为一空间面,与坐标平面无任何位置关系,又要保证下动板处于中间位置时,液压缸和两侧的万向节的4个叉形接头轴线重合,并要保证与基座相接的万向节回转中心分布在直径600mm的圆上,与下动板相接的万向节回转中心分布在直径300mm的圆上,万向节两两成对,共3对,每对回转中间距80mm,圆周分布(参考图1和图6)。所以要经过精确空间位置计算,利用构建辅助线、辅助面、拉伸等方法完成建模。

相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF