随着计算机应用技术的发展,计算机仿真已成为现代机构学重要的科研手段,它在可行性论证、工程设计和寻求最佳方案等方面发挥着重要作用,因而为机构仿真提供准确数据来源的运动分析也显得尤为重要。目前,国外机构运动分析方面的软件在人机交互、图形图像处理和可视化方面做的比较好,但在运动分析时一般采用非线性方程组迭代求解,速度慢,特别是对于比较复杂的机构就更慢,有时甚至不能收敛;国内这方面的软件在运动分析及受力分析方法方面已达到世界先进水平,但大多是用二维符号表示传动类型和机构结构类型,一般也仅着眼于数值计算,缺乏与三维CAD技术的紧密结合,不适合一般工程技术人员使用。
所以说以强大的三维实体造型软件为支撑软件结合国内先进的分析方法,开发具有自主知识产权的连杆机构参数化实体运动分析和仿真系统是十分有意义的。文中采用的软件平台是SolidWorks,分析理论采用型转化理论和广义型转化理论。
1连杆机构运动分析与仿真系统的实现
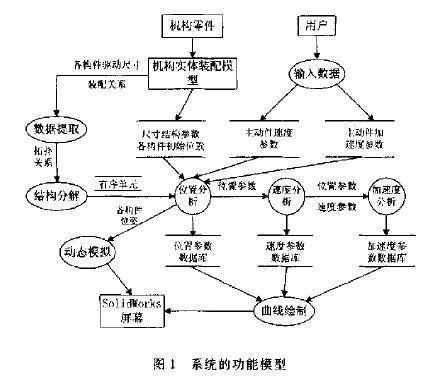
系统具备对由转动副、移动副等连接而成的连杆机构进行三维参数化实体建模、运动学分析以及动态仿真的功能(见图1)
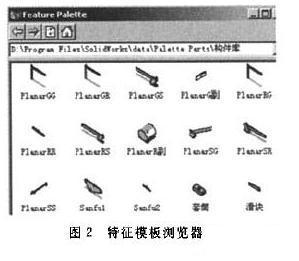
为了实现构件的快速建模和避免重复性工作,建立了一些常用构件的三维参数化模板库.用户可以在特征模板中查询和调用各种构件模型(如图2).构件建模时应充分利用SolidWorks提供的16种几何约束关系,以得到各种特征之间的几何约束关系.
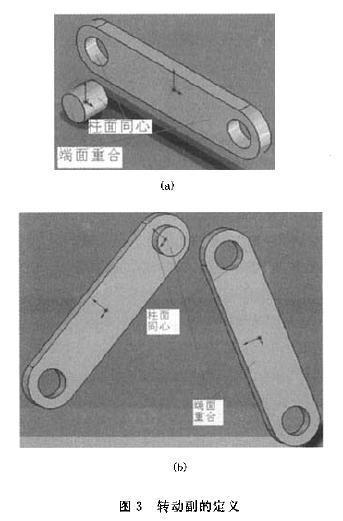
SolidWorks中的配合是基于特征的,而机构中各构件是通过运动副连接的,因此,装配时构件之间的配合特征要体现出运动副的类塑特性.图3说明了转动副的定义过程.
1. 2装配信息的提取与转化
在SolidWorks环境中装配好的机构并不能直接用于机构分析,必须提取出装配体的配合特征信息,并将其转化为机构分解与分析所需要的拓扑信息和结构数据.
通过遍历所有配合特征,得到配合特征的名称和两个配合构件的名称.装配信息向拓扑信息的转化是以构件的名称为索引通过遍历装配特征信息链表实现的.首先通过SolidWorks API提供的方法遍历装配体,得到固定构件(即机架)名称.然后以机架名称为索引遍历链表,找到与机架相连的构件名称"Partl<1>",并为其编号;再次以"Partl <1>"为索引遍历链表,…,依次类推,所有构件和运动副被按序编号,从而得到机构的拓扑信息.
1. 3结构分解及型转化单元的分析模型
识别出结构分解所需要的信息后,结构分解路线的优选原则将机构分解为机架、主动件和有序单元组(虚拟单构件、双杆组、约束单构件).型转化单元共有37种,其数学模型可以归纳为26种.因此,构造一个单元基类CUnit来定义型转化单元运动分析的共同属性和方法,再从单元基类中派生出各种单元类对象.通过基类中虚函数的定义,引人多态机制,便于程序扩充.
1.3运动分析与仿真的实现
机构分解完成后,通过调用主动件及各型转化单元的运动分析子程序,从而实现对整个机构的运动分析.首先调用Component:: GetXform来得到该构件的初始位置的位姿矩阵,当主动件位置发生变化的时候,顺序调用各型转化单元的运动分析子程序,得到该位置的分析结果,然后调用Component::SetXform重新设置构件的位姿矩阵,这样的话,运动分析的结果就直接为仿真服务,从而实现动态仿真
2算例
以下面六杆机构为例说明机构的分解和分析仿真(机构三维实体模型和机构简图分别见图5和图6).
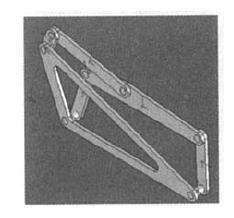
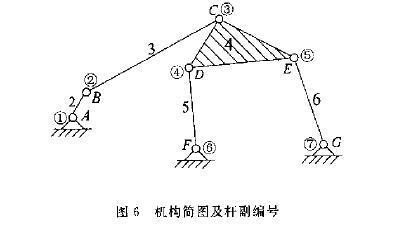
选取的计算参数:主动件AB转动步长为10°
杆组分解结果:型转化数为1;虚拟单构件为BC杆,约束单构件为EG杆,其余两杆为双杆组.
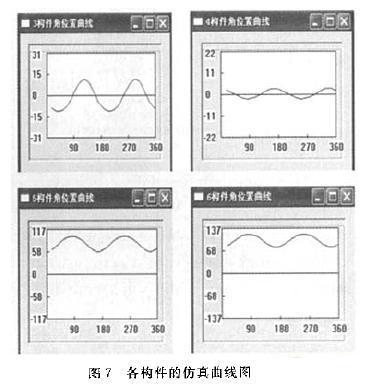
经程序计算,得到各杆的仿真曲线如图7所示
3结论
文中研究了在SolidWorks平台上开发面向对象的连杆机构参数化实体运动仿真系统的方法.结合国内先进的机构分析理论和SolidWorks强大的造型功能及其提供的API对象,开发出了一套三维实体化的通用连杆机构运动分析和仿真系统.
所开发的系统的特点.
1)完全基于三维实体的分析.运动分析中产生的大量数据以动态模拟、曲线图、数据表等形式表现出来,增强了连杆机构设计的直观性,并为连杆机构设计提供了全面准确的参考数据.
2)由于参数化构件模板库的建立,大大简化了机构实体建模的过程;而装配特征隐含了运动副的信息.省略了交互定义运动副的过程.
3)采用型转化及广义型转化的理论,将机构运动分析方程的维数降至最低,提高了求解的速度;模型构造与求解算法稳定可靠,不会出现系统崩溃现象.
4)具有良好的用户界面和适时的交互能力,程序的自动识别能力强,用户交互信息少,操作方便,对用户的专业要求很低
5)程序的通用性好,不受机构复杂性和自由度的限制.
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF