一 引言
太阳能是资源最丰富的可再生能源,具有独特的优势和巨大的开发利用潜力,进入21世纪以来,世界太阳能光伏发电产业快速发展,我国光伏产业在国家大型工程项目、推广计划和国际合作项目的推动下,以前所未有的速度迅速发展。但目前我国光伏产业规模较小、基础薄弱,太阳电池组件制造的关键设备主要依靠进口,企业缺乏产品的技术核心,相关部件的产品质量和技术水平还有待进一步提高。为了满足我国太阳电池组件生产企业对封装设备的要求,在各种电气及机械设备法规的规定下,结合当今太阳电池组件层压机的发展状况,考虑到经济实用问题,对半自动太阳电池组件层压机进行设计。

图1 太阳电池组件层压机三维模型图

图2 太阳电池组件层压机实物图
二 太阳电池组件层压机整体结构设计
1 太阳电池组件层压机的结构
半自动太阳电池组件层压机由机体、下真空室、起升铰架、上真空室、加热板、起升气缸六个部分组成。如图1,2所示。
2 太阳电池组件层压机的工作过程
太阳电池组件层压机的工作过程:打开层压机,按下加热按钮,设定好工作温度,待加热板温度达到指定温度后,将层叠好的电池片放人层压室中,合上盖后进行下室抽气。将层叠好的太阳电池板放置在两层玻璃布间(属于下真空室部分),EVA(乙烯一醋酸乙烯共聚物胶膜)在层压机内开始受热,达到熔融状态。EVA与电池板、玻璃,TPT(太阳能背板专用复合膜)之间如有空气存在,下室抽气(抽真空)可以将这些间隙中的空气排除。抽气之后对上真空室充气进行加压。在加压过程中,下室继续抽真空,上室充气,胶皮气囊构成的上真空室,充气后体积膨胀(由于下室抽真空)充斥整个上、下室之间,挤压放置在下室的电池片、EVA等,熔融后的EVA在挤压和下室抽空的作用下,流动充满玻璃、电池片、TPT之间的间隙,同时排出中间的气泡。
在前两个过程中,下室处于真空状态,在大气压力作用下,上盖受向下的压力。然后利用设置在上盖的四个起升铰架将上盖打开,取出电池片开盖时,下室充气,上室抽空,使放电池组件的下腔气压与大气压平衡,利用设置在上盖的四个起升铰架将上盖打开,再进行下一块电池组件的封装。
3 太阳电池组件层压机的性能参数
太阳电池组件层压机的生产能力为5600W/d,工作面积2200mm X 1750mm,层压机总功率23kW,抽真空时间5---7min,工作面温度不均匀性11.5C以内。
三 太阳电池组件层压机的运动分析
Mechanism是Pro/E的机构模块,具有很强的机构仿真功能,通过软件对设计模型进行仿真和分析能够模拟真实环境中传动装置的工作状况,并对其进行分析和判断,以尽早发现设计缺陷和潜在的失败可能,提前进行改善和修正,以减少后期修改而付出的宝贵代价,缩短设计周期。
打开太阳电池组件层压机装配图,点击主菜单中的“应用程序”菜单,选择菜单中的“机构”项,进入机构运动仿真模块。对各个运动副进行定义,如图3所示,对各个运动件设定12个连接并设定运动参数,通过Mechanism模块对太阳电池组件层压机进行运动仿真,可以看出该机构能够按照最初设计的要求工作,并且各个机构之间没有发生运动干涉的现象。

图3 起升机构的运动分析示意图
四 起升铰架的有限元分析
起升铰架在工作过程中要承受来自上真空室的交变载荷,其力学性能和机械性能直接影响太阳电池组件层压机的工作可靠性。起升铰架的变形和折断是失效的主要原因,为简化模型,提高分析效率,对起升铰架进行受力分析时,按以下步骤对起升铰架进行有限元分析。
1 实体建模
在结构设计中,根据整个设计要求采用Pro/E的三维建模技术,根据与其配合其它零部件的结构尺寸,建立起升铰架的三维模型图,如图4所示。

图4 起升铰架模型图
2 定义约束及载荷
约束和载荷都是在Pro/Mechanica里用来仿真实物的重要依据,“约束”是针对实际的情况,对结构的点、线、面的自由度做一约束。对起升铰架模型的四个铰接点施加柱面约束,如图5所示。
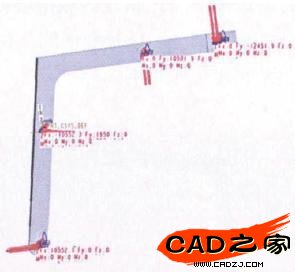
图5 起升铰架约束和载荷图
对起升铰架添加载荷,选择铰架上四个铰接处的柱面作为铰架受力的作用面,定义铰架所承受的载荷,如图5所示,该铰架所承受的载荷为Fx1=ON,Fy1=-12451.9N;Fx2=0N;Fy2=10501.9N;FX3=一10552.3N,Fy3=1950N; Fx4=10552.3N,Fy4=0N。
3 定义材料特征
定义材料特征要尽量符合实际材料的性能,使其分析结果能够近似于真实状况。起升铰架采用的是Q235碳素结构钢材料,其材料特征定义为质量密度Kg·mm-3 : 7.82E-06;杨氏模量/MPa:2E+005;泊松比:0.27;抗拉强度强度/MPa: 375;疲劳强度系数;1.0;剪切模量/MPa:0.79E+005;表面特性:polished。
4 网格划分
为获得良好的网格质量和足够的分析精度,同时又满足普通设计快速划分网格的应用要求,选用4节点四面体单元进行网格划分,如图6所示。
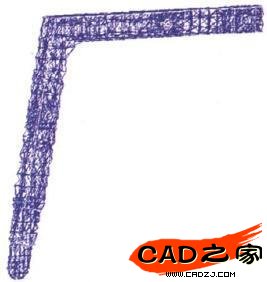
图6 网格示意图
5 应力分析求解
为起升铰架定义了约束和载荷后再进行力学分析。静态分析将根据模型中指定的约束和载荷,计算模型中的变形、应力和应变。静态分析会告诉设计者模型是否可以承受得住指定的载荷条件,零件所能承受的临界点在何处,以及变形的位移量是多少。分析云图如图7、图8所示。
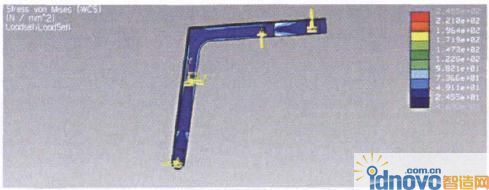
图7 模型的应力变化云图
由结果云图可知,起升铰架在静载工况下,承受的最大应力为245MPa,查阅相关机械设计手册可以看出,最大应力小于所选铰架材料许用应力(375MPa)要求,最大变形量为6mm。符合设计要求且有足够的强度储备。
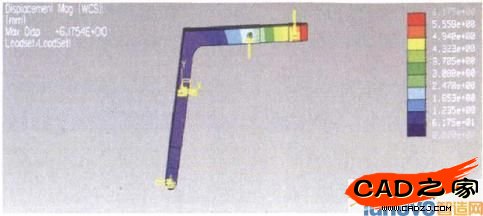
图8 模型的变形云图
五 结论
使用Pro/E软件对太阳电池组件层压机的设计,其三维造型、运动仿真和有限元分析的设计理念及方法可以大大减少工作量,提高工作效率;通过机械仿真,对各种零件进行装配后模拟机械的运动,从而检查机械的运动是否达到设计要求,各种构件是否发生干涉,将在整机设计中可能存在的问题消除在萌芽状态通过使用有限元分析模块对传动装置进行静力分析计算,及时调整和优化模型结构,分析比较,为确定最终方案带来了很大的便利。
经过对样机的试制、装配和调试,该太阳电池组件层压机能够很好地满足太阳电沁的封装要求,采用该设备封装的太阳电池组件经测试符合GB/T6495.1一1996,GB/T6495.2-1996标准要求,具有以下特点:
(1)产品采用用户界面人性化设计,标准化程度高;
(2)操作简单、安全,维修方便,工人劳动强度低;
(3)采用三次层压工艺,自动完成加热、抽真空、层压等生产工艺过程,具有自动化程度高、性能稳定、粘结牢度大、
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF