本文介绍了FANUC系统的相关内容。
一 FANUC系统简介
FANUC系统是日本富士通公司的产品,通常其中文译名为发那科。FANUC系统进入中国市场有非常悠久的历史,有多种型号的产品在使用,使用较为广泛的产品有FANUC 0、FANUC16、FANUC18、FANUC21等。在这些型号中,使用最为广泛的是FANUC0系列。
系统在设计中大量采用模块化结构。这种结构易于拆装、各个控制板高度集成,使可靠性有很大提高,而且便于维修、更换。FANUC系统设计了比较健全的自我保护电路。
PMC信号和PMC功能指令极为丰富,便于工具机厂商编制PMC控制程序,而且增加了编程的灵活性。系统提供串行RS232C接口,以太网接口,能够完成PC和机床之间的数据传输。
FANUC系统性能稳定,操作界面友好,系统各系列总体结构非常的类似,具有基本统一的操作界面。FANUC系统可以在较为宽泛的环境中使用,对于电压、温度等外界条件的要求不是特别高,因此适应性很强。
鉴于前述的特点,FANUC系统拥有广泛的客户。使用该系统的操作员队伍十分庞大,因此有必要了解该系统的一些软、硬件上的特点。
我们可以通过常见的FANUC 0系列了解整个FANUC系统的特点。
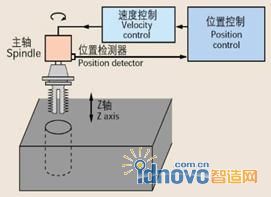
1. 刚性攻丝
主轴控制回路为位置闭环控制,主轴电机的旋转与攻丝轴(Z轴)进给完全同步,从而实现高速高精度攻丝。
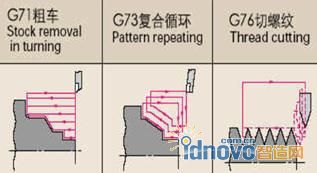
2. 复合加工循环
复合加工循环可用简单指令生成一系列的切削路径。比如定义了工件的最终轮廓,可以自动生成多次粗车的刀具路径,简化了车床编程。
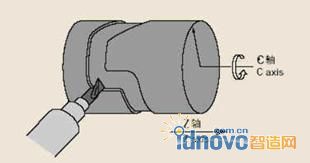
3. 圆柱插补
适用于切削圆柱上的槽,能够按照圆柱表面的展开图进行编程。
4. 直接尺寸编程
可直接指定诸如直线的倾角、倒角值、转角半径值等尺寸,这些尺寸在零件图上指定,这样能简化部件加工程序的编程。
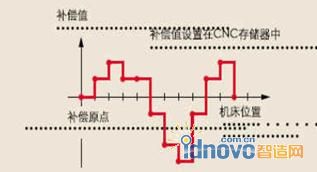
5. 记忆型螺距误差补偿 可对丝杠螺距误差等机械系统中的误差进行补偿,补偿数据以参数的形式存储在CNC的存储器中。
6. CNC内装PMC编程功能
PMC对机床和外部设备进行程序控制
7. 随机存储模块
MTB(机床厂)可在CNC上直接改变PMC程序和宏执行器程序。由于使用的是闪存芯片,故无需专用的RAM写入器或PMC的调试RAM。
8. 显示装置

二 FANUC 0系列硬件框架
(请参阅:FANUC 0I-A连接说明书(硬件))
1. 系统构成
图3-5系统硬件概要
图3-5从总体上描述了系统板上应该连接的硬件和应具有的功能。
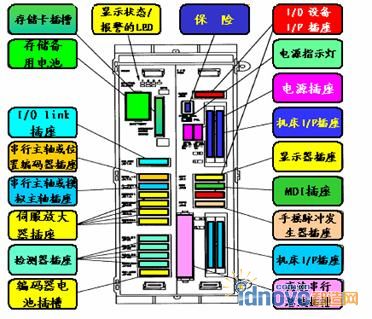
图3-6FANUC 0i系列控制单元构成及连接
图3-6所表示的是FANUC0i控制单元及其所要连接的部件示意图,每一个文字方框中表示的部件,都按照图中所列的位置(插座、插槽)与系统相连接。具体的连接方式、方法请参照FANUC连接说明书(硬件)的各章节。
2. 系统连线
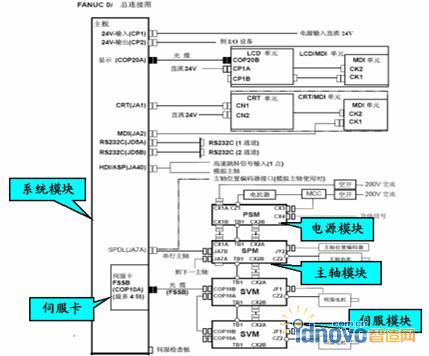
系统综合连接图(1)
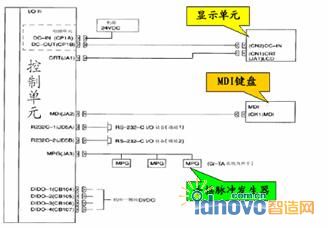
系统综合连接图(2)
系统的综合连接详图中标示了系统板上的插槽名以及每一个插槽所连接的部件。
3. 系统构成
主轴电动机的控制有两种接口;模拟和数字(串行传送)输出。模拟接口需用其他公司的变频器及电动机。
(1) 模拟主轴接口
模拟主轴的接口定义如图所示:
模拟主轴的连接如图所示:
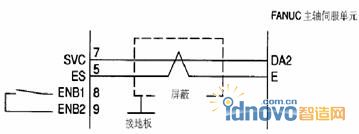
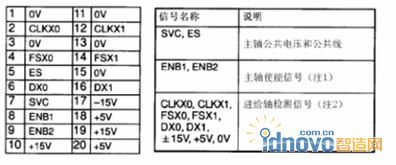
(2) 串行主轴接口
串行主轴的接口定义如图所示:
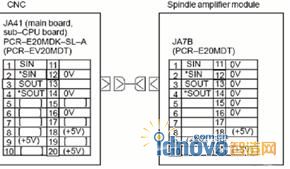
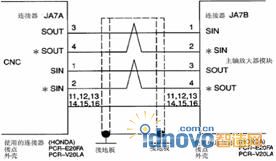
串行主轴的连接如图所示:
4. 数字伺服
伺服的连接分A型和B型,由伺服放大器上的一个短接棒控制。A型连接是将位置反馈线接到cNc系统,B型连接是将其接到伺服放大器。0i和近期开发的系统用B型。o系统大多数用A型。两种接法不能任意使用,与伺服软件有关。连接时最后的放大器JxlB需插上FANUC (提供的短接插头,如果遗忘会出现#401报警.另外,荐选用一个伺服放大器控制两个电动机,应将大电动机电抠接在M端子上,小电动机接在L端子上.否则电动机运行时会听到不正常的嗡声。
三 FANUC系统参数
(请参阅:FANUC 0I-A参数说明书 FANUC 0I-B参数)
参数在NC系统中用设定NC数控机床及辅助设备的规格和内容,及加工操作所必需的一些数据。机床厂家在制造机床、最终用户在使用过程中,通过参数的设定,来实现对伺服驱动、加工条件、机床坐标、操作功能、数据传输等方面的设定和调用。
机床厂商、用户在配备、使用FANUC系统时,根据具体的使用状况,有大量的参数需要调整和设置。在使用和调整这些参数是有必要搞清楚这些参数的用途和设置方法。在下文中介绍一些有关FANUC系统参数的常识和一些常用参数。
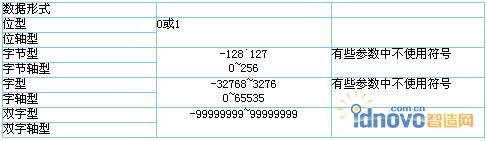
表3-2FANUC系统参数类型列表
(一)、FANUC系统参数分类
按照数据形式参数可以分为下表所表示的类别:
1、对于位型和位轴型参数,每个数据号由8位组成,每一位有不同的意义。
2、轴型参数允许参数分别设定给每个控制轴。
3、每个数据类型有一个通用的有效范围,参数不同其数据范围也不同。
为了进一步说明这两类数据在数据设定方面的区别,特举如下两个例子:
1、位型和位轴型参数举例

通过该例可以知道位型和位轴型的数据格式,它们都是每一个数据号由0~7位数据组成。在描述这一类数据时可以用这样的格式来说明:数据号.位号。比如上例中的ISO参数就可以用这样的符号来表示:1000.1。1000.1=0时表示数据采用EIA码输出,1000.1=1时表示数据输出采用ISO码。位型和位轴型数据就是用这样的方式来设定不同的系统功能。
2、位型和位轴型以外的数据

FANUC系统将常用的参数例如:通讯、镜像、I/O口的选择等常见参数放置在SETTING功能键下,以便于用户使用。其他大量的参数归类于SYSTEM功能键下的参数菜单。这一点和西门子将参数分为机床参数和设定参数有点类似。
下面介绍一些常用的系统参数:
1、与各轴的控制和设定单位相关的参数:参数号1001~1023;
这一类参数主要用于设定各轴的移动单位、各轴的控制方式、伺服轴的设定、各轴的运动方式等等。
2、与机床坐标系的设定、参考点、原点等相关的参数:参数号1201~1280;
这一类参数主要用于设定机床的坐标系的设定,原点的偏移、工件坐标系的扩展等等。
3、与存储行程检查相关的参数:参数号:1300~1327;
这一类参数的设定主要是用于各轴保护区域的设定等等。
4、与设定机床各轴进给、快速移动速度、手动速度等相关的参数:参数号:1401~1465;
这一类参数涉及机床各轴在各种移动方式、模式下的移动速度的设定,包括快移极限速度、进给极限速度、手动移动速度的设定等等。
5、与加减速控制相关的参数:参数好:1601~1785;
这一类参数用于设定各种插补方式下的启动停止时的加减速的方式,以及在程序路径发生变化时(如出现转角、过渡等)进给速度的变化。
6、与程序编制相关的参数:参数号:3401~3460;
用于设置编程时的数据格式,设置使用的G指令格式、设置系统缺省的有效指令模态等等和程序编制有关的状态。
7、与螺距误差补偿相关的参数:参数号:3620~3627;
我们知道,数控机床具有对螺距误差进行电气补偿的功能。在使用这样的功能时,系统要求对补偿的方式、补偿的点数、补偿的起始位置、补偿的间隔等等参数进行设置。
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF