数控电解加工与数控切削加工在解决复杂零件加工上相互补充,成为航空发动机、风机、水泵中加工涡轮、压气机静子、三元流叶轮等整体构件的主要加工方式.整体构件数控电解加工一般先分析数据,建立几何模型,从几何模型获取工艺数据,制定加工工艺方案,计算工序间余量分配;然后进行阴极设计、夹具设计、加工编程、零件测量等工作.过去,整体构件的电解加工过分依赖于加工技术人员的经验,工艺装备设计的周期长,工艺试验次数多,其主要原因在于:1)整体构件的形状特殊,数据处理、加工路径的规划、编程较复杂;2)阴极设计的成功率低,反复试验的次数多,设计周期长;3)电解加工过程复杂,影响成形的因素多,工艺试验过程中缺少先进的计算与分析手段,成形精度达不到要求.这些一直是制约电解加工工艺推广应用的主要因素.电解加工技术人员在长期的加工探索中逐步意识到,把CAD/CAE/CAM等先进技术引入电解加工领域,已成为提高电解加工效率以及工艺试验成功率的有效措施之一.
近几年来,国内外电解加工技术人员十分重视电解加工的数字化制造技术研究,对电解加工中的CAD/CAE/CAM、加工工艺数据库等技术进行了研究,提出了叶片的电解加工CAD/CAE/CAM专家系统框架;开发了阴极设计的CAD/CAE/CAM系统,实现了电解加工的仿真.这些研究成果主要集中在电解加工的单元技术方面,为加工技术平台的构建提供了技术支撑;但其局限于只能针对特定零件的加工,通用性差,没有形成系统化、集成化的电解加工应用系统.本文在对数控电解加工关键技术研究的基础上,采用软件开发技术构建了整体构件数控电解加工CAD/CAM技术平台(简称加工平台),下面主要介绍其构成、关键技术及其应用.
1加工平台构建
加工平台体系构成如图1所示,其平台分为3层结构:上层为表示层,包括加工零件逆向建模、数据处理、阴极设计、数控加工运动过程仿真、自动编程和零件测量接口界面;中间层为业务逻辑层,包括几何建模、数据处理、有限元分析、运动仿真、加工编程和参数优化单元技术模块;下层为数据层,实现数据的存储与检索等功能.
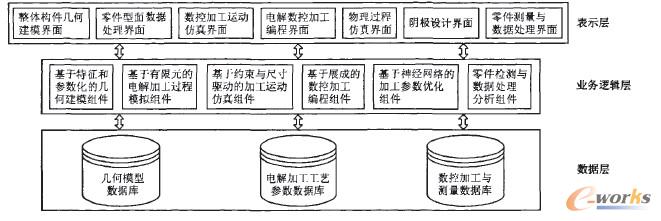
图1加工平台构成
2加工平台实现的功能
在电解加工工艺设计过程中,曲面建模与数据处理、阴极设计、工艺参数选择、加工路径规划与数控加工编程是电解加工的几大难点,构建加工平台就是通过对其关键技术的研究解决这些难题,达到快速、高效的目的.该加工平台是围绕电解加工的难点建立起来的,主要实现的功能有:1)零件建模与数据处理;2)电解加工模拟与阴极设计;3)加工参数选择与优化;4)数控运动仿真与加工编程;5)零件测量与误差分析.
3加工平台关键技术
3.1参数化与特征建模技术
参数化建模、特征建模和变量化建模是当今CAD建模的主流技术.整体构件通常由基本特征与特殊结构组成,对于基本特征的造型,CAD软件都具有这些基本功能;对于整体构件的特殊结构的造型,则需要利用CAD软件提供的开放接口以及整体构件加工表面的数学模型经过二次开发而成.下面以图2所示的整体叶轮叶片参数化建模为例进行说明.
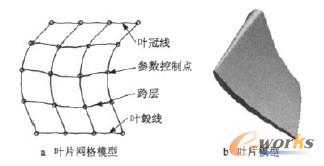
图2叶片参数化建模
叶片参数化建模首先要建立叶片的网格模型,通常叶片的网格模型结构如图2a所示.它把叶片沿径向分成n个跨距层,每层上有一个控制点,在叶片的轴向上又分为m个切片层,这样就有n×m个控制点.利用这些控制点构造叶片的网格线,再由网格线构造曲面,然后在网格面上叠加上叶片的厚度分布,就形成了叶片轮廓,建好的叶片模型如图2b所示.叶片的参数由控制点的数目决定,实际应用中可以固定部分边界点,以减少叶片的参数数量.
3.2 电解加工物理过程数值模拟技术
电解加工的过程非常复杂,加工成形受到电场、流场、温度等影响.研究表明,电解加丁的成形形状主要与阴极刃口形状、加工运动轨迹有关;加工精度与电场、流场分布,进给速度等参数有关.本加工平台运用电解加工理论模型,采用过程离散法和连续有限元计算法实现了加工过程的物理模拟,真实地模拟了整个电解加工的物理过程,利用它可辅助设计阴极、优化加工参数、预测加工形状.
电解加工物理过程模拟首先要建立加工的数学模型,根据加工原理把电解加工的连续加工过程用微分方程表示,即
![]() (1)
(1)
其中,![]() 为电解加工中溶解速度,方向为溶解面的法线方向;dt为时间增量;dl为dt出时间内的溶解位移增量.
为电解加工中溶解速度,方向为溶解面的法线方向;dt为时间增量;dl为dt出时间内的溶解位移增量.
为了求解方程式(1),把整个电解加工过程按加工时间离散成若干个连续的微小加工区间.加工过程的离散方法如下:
设![]() 为总的电化学加工时间,对
为总的电化学加工时间,对![]() 以Δt为时间步长进行离散,则得到
以Δt为时间步长进行离散,则得到![]() 的一个时间序列
的一个时间序列![]()
![]() 以时间序列中每一个时刻
以时间序列中每一个时刻![]() 为计算点计算阳极溶解面的位置,则工件阳极溶解面在△t内的位移为
为计算点计算阳极溶解面的位置,则工件阳极溶解面在△t内的位移为
![]() (2)
(2)
由式(2)可知,阳极溶解面从![]() 到
到![]() 位置为
位置为
![]() (3)
(3)
其中α为溶解速度![]() 与X方向的夹角.
与X方向的夹角.
设![]() 时刻阴极送进速度为
时刻阴极送进速度为![]() ,则阴极从
,则阴极从![]() 到
到![]() 时刻的位置为
时刻的位置为
 (4)
(4)
其中ψ为送进速度![]() 与X方向的夹角.
与X方向的夹角.
式(3)(4)即为仿真过程中阳极溶解表面和阴极位置的递推计算公式.根据它们可以计算阳极溶解表面和阴极在加工过程中任何时刻的位置,再以此时刻的阴极和阳极位置计算加工间隙中的电场和流场,以此类推,最后计算出阳极溶解表面的最终加工形状.
相关文章
- 2021-09-08BIM技术丛书Revit软件应用系列Autodesk Revit族详解 [
- 2021-09-08全国专业技术人员计算机应用能力考试用书 AutoCAD2004
- 2021-09-08EXCEL在工作中的应用 制表、数据处理及宏应用PDF下载
- 2021-08-30从零开始AutoCAD 2014中文版机械制图基础培训教程 [李
- 2021-08-30从零开始AutoCAD 2014中文版建筑制图基础培训教程 [朱
- 2021-08-30电气CAD实例教程AutoCAD 2010中文版 [左昉 等编著] 20
- 2021-08-30电影风暴2:Maya影像实拍与三维合成攻略PDF下载
- 2021-08-30高等院校艺术设计案例教程中文版AutoCAD 建筑设计案例
- 2021-08-29环境艺术制图AutoCAD [徐幼光 编著] 2013年PDF下载
- 2021-08-29机械AutoCAD 项目教程 第3版 [缪希伟 主编] 2012年PDF